Thay đổi ngôn ngữ :
Phần mềm điều khiển robot - igus® Robot Control
Lập trình, mô phỏng và điều khiển robot mà không cần mua bản quyền
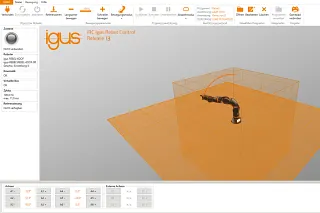
Phần mềm igus® Robot Control cho phép lập trình và điều khiển robot một cách đơn giản, trực quan, giúp Quý khách dễ dàng bắt đầu với tự động hóa. Nhờ cấu trúc mô-đun, có thể điều khiển nhiều loại robot với các dạng động học khác nhau, ví dụ như robot delta, robot tuyến tính và robot khớp nối đa trục. Quý khách hàng có thể mô phỏng chuyển động của từng robot trên giao diện 3D – Robot không cần kết nối thiết bị thực tế trong bước này.
Những gì bạn sẽ tìm thấy trên trang này
Phần mềm lập trình robot miễn phí
Các ví dụ lập trình cho nhiều ứng dụng khác nhau bằng phần mềm điều khiển robot
- Kết nối đơn giản giữa robot và hệ thống điều khiển
- Vận hành trực quan với giao diện 3D và mô hình số (digital twin), cho phép thực hiện và kiểm tra trực tiếp các chuỗi chuyển động
- Có thể cấu hình giao diện camera trực tiếp thông qua hệ thống điều khiển và phần mềm
- Lập trình robot dạng delta, tuyến tính (linear), SCARA và cánh tay khớp nối (articulated arm)
- Phần mềm cho phép thử nghiệm không rủi ro ngay cả trước khi mua
Yêu cầu hệ thống:
- Máy tính có hệ điều hành Windows 10
- Giao tiếp qua Ethernet hoặc WLAN
- 500MB dung lượng đĩa trống
Chương trình mẫu, wiki và các khóa đào tạo



Giao diện
Giao diện PLC
Giao diện PLC (PLC = Bộ điều khiển logic lập trình) cho phép thực hiện các chức năng cơ bản và truyền tín hiệu trạng thái bằng các đầu vào và đầu ra kỹ thuật số. Ngoài việc điều khiển bằng PLC, giao diện này cũng cho phép vận hành thông qua các nút vật lý.
Đầu vào và đầu ra kỹ thuật số
Các chương trình robot có thể được tải và khởi động, đồng thời các lệnh điều khiển gắp (gripper) có thể được gửi qua đầu vào kỹ thuật số hoặc tín hiệu toàn cục (global signals). Điều này đặc biệt hữu ích khi cần chọn một chương trình từ danh sách có sẵn bằng các nút bấm hoặc thông qua lệnh CRI-GSig.
Modbus TCP/IP
Giao diện Modbus TCP có thể được sử dụng để gửi dữ liệu và lệnh từ PLC đến hệ thống điều khiển robot, cũng như nhận thông tin trạng thái từ robot, ví dụ như trạng thái vận hành hoặc lỗi.
Giao diện CRI
Giao diện CRI cho phép gửi các lệnh phức tạp và thông tin cùng các thiết lập được lấy qua giao diện Ethernet sử dụng TCP/IP. igus Robot Control sử dụng giao diện này để kết nối với robot có hệ thống điều khiển tích hợp hoặc các phiên bản khác của hệ thống điều khiển.
Giao diện máy ảnh
Giao diện camera cho phép sử dụng các thiết bị nhận diện vật thể và camera quan sát. Camera nhận diện vật thể có khả năng xác định vị trí và phân loại đối tượng, sau đó truyền dữ liệu này – kèm theo hình ảnh video (nếu cần) – đến hệ thống điều khiển. Hệ thống điều khiển sẽ tính toán tọa độ trong hệ trục của robot dựa trên vị trí đối tượng do camera cung cấp. Trong khi đó, các camera chỉ có chức năng truyền hình ảnh (camera quan sát thông thường) chỉ dùng để giám sát khu vực làm việc, chứ không hỗ trợ nhận diện vật thể.
Đám mây
Giao diện đám mây cho phép giám sát robot thông qua RobotDimension. Sau khi được kích hoạt và đăng nhập, robot sẽ gửi thông tin trạng thái cơ bản và hình ảnh camera đến dịch vụ trực tuyến. Người dùng có thể liệt kê robot của mình trên trang web và lấy thông tin.
ROS, Matlab, LabView, v.v.
Tích hợp robot vào môi trường ROS của bạn. Tài liệu và gói phần mềm cho giao tiếp phần cứng, Teleop và moveI
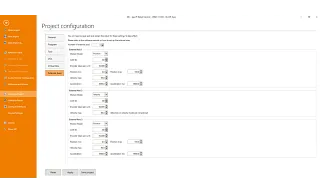
Cấu hình dự án
Kẹp (Gripper)
Công cụ lắp ráp có thể được chỉ định tại đây. Việc thay đổi công cụ yêu cầu phải tải lại dự án hoặc khởi động lại hệ thống điều khiển tích hợp. Công cụ mới có thể được định nghĩa là tệp cấu hình trong thư mục "Data/Tools"
Hộp ảo (Virtual box)
Phạm vi chuyển động của cánh tay robot bị hạn chế bởi các thiết lập của hộp ảo. Chức năng này giúp ngăn ngừa hư hỏng cơ học và đơn giản hóa việc lập trình, tùy thuộc vào ứng dụng. Nếu chương trình được thực thi vi phạm hộp ảo, chương trình cũng sẽ dừng lại với một thông báo lỗi.
Trục ngoài (External axis)
Hệ thống điều khiển robot hỗ trợ tối đa 3 trục bổ sung (còn được gọi là "trục ngoài" trong iRC). Chúng có thể được lắp tương ứng theo trục robot và được cấu hình thông qua khu vực cấu hình của iRC.

Chương trình (Program)
Tại đây bạn có thể xác định chương trình logic và robot, tốc độ di chuyển (tính theo phần trăm tốc độ tối đa), chế độ phát lại và phản ứng với lỗi chương trình.
Động học đặc biệt (Special kinematics)
Hệ thống điều khiển robot có thể được tùy chỉnh cho robot của người dùng bằng bản sao kỹ thuật số (digital twin). Chúng tôi cấu hình động học ngược để phù hợp với dự án kinh doanh của khách hàng.
Lập trình
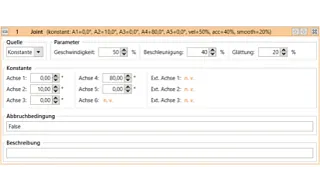
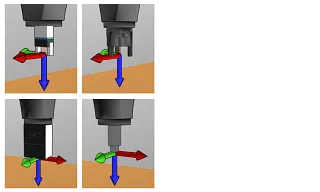
Chuyển động trục (Axis movements)
Lệnh Joint di chuyển robot đến vị trí đích tuyệt đối được chỉ định theo tọa độ trục (ví dụ: góc quay trục hoặc vị trí của trục tuyến tính). Chuyển động kết quả của TCP thường là đường cong thay vì đường thẳng.
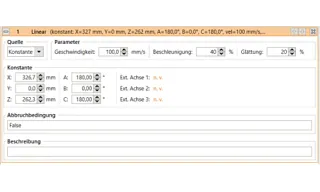
Chuyển động tuyến tính (Linear movement)
Lệnh Linear di chuyển robot đến vị trí đích tuyệt đối được xác định theo tọa độ Descartes (Cartesian). Chuyển động của TCP theo sau sẽ là một đường thẳng.
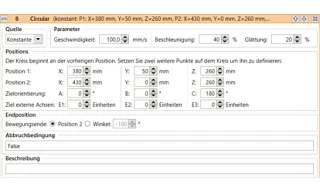
Chuyển động tròn (Circular movements)
Lệnh "Chuyển động tròn" cho phép chuyển động theo đường tròn toàn phần hoặc một phần. Lệnh này tương thích với chuyển động tuyến tính, giúp quá trình chuyển tiếp giữa chuyển động tuyến tính và chuyển động tròn trở nên mượt mà hơn.
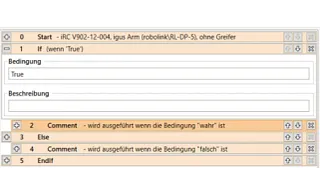
Điều kiện (Conditions)
Điều kiện có thể được sử dụng trong lệnh if-then-else, vòng lặp (loops) và điều kiện hủy trong lệnh chuyển động. Các điều kiện này có thể là sự kết hợp của các tín hiệu đầu vào số (digital inputs), tín hiệu toàn cục (global signals), phép toán logic (Boolean operations) và các phép so sánh.
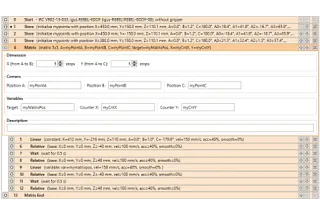
Tính toán ma trận (Matrix calculation)
Các lệnh dạng lưới (grid instructions) dùng để tính toán các vị trí căn chỉnh theo dạng lưới, ví dụ như các vị trí gắp hoặc đặt trong các tác vụ xếp hàng (palletising).
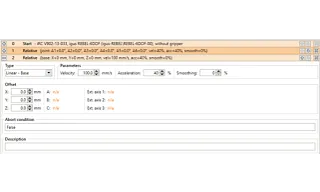
Chuyển động tương đối (Relative)
Lệnh "Relative" cho phép bạn di chuyển robot tương đối so với vị trí hiện tại của nó. Lệnh này có thể được truy cập qua các mục trong menu "Action" → "Relative movement".
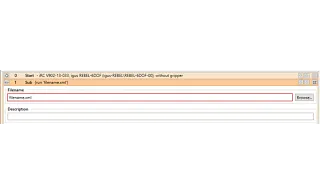
Chương trình con (Sub-programs)
Các chương trình con có thể được gọi bằng lệnh phụ "sub". Đường dẫn đến tệp chương trình con được chỉ định trong mục "Tên tệp" (File name). Đường dẫn này liên quan với thư mục con "Programs" trong thư mục "Data" của iRC.
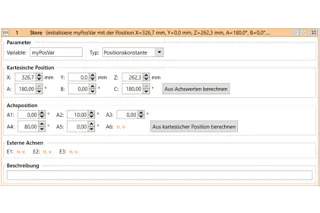
Biến và quyền truy cập biến
Có hai loại biến được hỗ trợ trong chương trình igus Robot Control và TinyCtrl:
- Biến số: Có thể dùng để lưu trữ số nguyên hoặc số thực.
- Biến vị trí: Có thể dùng để lưu trữ các vị trí Descartes và vị trí khớp (joiViệc biến được hiểu là vị trí Cartesian hay vị trí khớp phụ thuộc vào ngữ cảnh sử dụng.
Tải xuống phần mềm robot

Phần mềm igus® Robot Control miễn phí bản quyền được tích hợp sẵn trong hệ thống điều khiển, vì vậy sử dụng giao diện vận hành tiêu chuẩn hóa và các dịch vụ truyền thông nhất quán cho nhiều thành phần trong cùng một hệ thống. Điều này giúp giảm khối lượng công việc lập kế hoạch dự án và rút ngắn thời gian đưa vào vận hành.
- Kiểm tra trước tất cả các động học của igus® trong phần mềm
- Với các dự án được lập trình sẵn cho tất cả các robot igus, trục đơn và xe tự hành AGV
- Giao diện 3D trực quan với mô phỏng chuyển động robot
Tư vấn & hỗ trợ
Hân hạnh được trả lời câu hỏi của quý khách

Báo giá và tư vấn trực tuyến
Thời gian làm việc:
Thứ Hai đến Thứ Sáu từ 8:30 đến 17:30
Online:
Thứ Hai đến Thứ Sáu từ 8:30 sáng đến 17:30